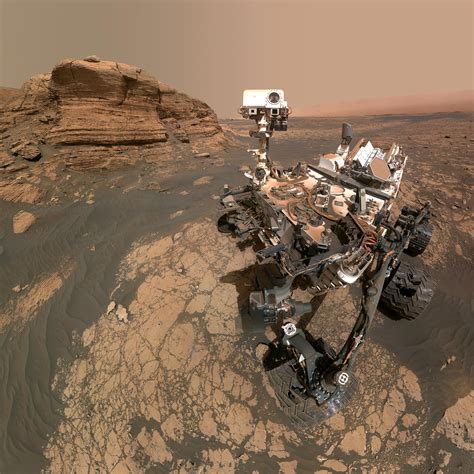
NASA’nın Mars Bilim Laboratuvarı misyonunun bir parçası olan Curiosity Rover, 6 Ağustos 2012’de Mars’a indi. Ana görevi, gezegenin iklimini ve jeolojisini araştırmak ve gezegenin şimdiye kadar uygun çevre koşulları sunup sunmadığını belirlemek için Mars’taki Gale Krateri’ni keşfetmektir. Mikrobiyal yaşam için. Kredi bilgileri: NASA
NASAMerakı Mars Rover’ın planlanan bilimsel faaliyetleri, sıradan bir çalışma alanı ve konumsal sınırlamalar nedeniyle uyarlandı, bu da daha erken veri analizine ve önemli bilimsel gözlemlerin sürdürülmesine olanak sağladı.
Dünya planlama tarihi: 22 Mayıs 2024 Çarşamba
Başka bir gezegende bir gezgini çalıştırmanın getirdiği en büyük zorluklardan biri, arabayı sürdükten sonra park ettiğimizde önümüzde ne olacağını her zaman tam olarak bilemememizdir. Bilim ekipleri ve gezici planlamacılarımız (aslında sürüşleri planlayanlar), Mars Yörünge Keşfi’ndeki HiRISE kameradan alınan yüksek çözünürlüklü görüntüler ile Curiosity’den bize bakan görüntülerin birleşiminden oluşan elimizdekilerin en iyisini yapıyorlar. planlanan sürüş yönü.
Ancak sonuçta, herhangi bir planlama gününde oraya ulaşana kadar neyle uğraşacağımızı bilmiyoruz. Bazen bunun nedeni, sürücünün “arıza vermesi” ve erken bitmesidir; bu, kayalık veya kumlu arazide sürüş sırasında gezicinin hareket sistemlerinin izin verilen maksimum sınırlarını aşmasına neden olan bir şeydir. Bugün durum böyle değildi, çünkü Pazartesi günü planladığımız Gediz Vallis kanal geçişine doğru 30 metrelik yolculuk mükemmel bir şekilde gerçekleştirildi. Bunun yerine, çoğunlukla kum ve daha küçük kayalardan oluşan “çalışma alanımız” (gezicinin önündeki, kolla ulaşılabilen alan) beklediğimiz kadar heyecan verici değildi.

Bu görüntü, NASA’nın Mars gezgini Curiosity’deki Sol Navigasyon Kamerası tarafından Sol 4192’de (2024/05/22 06:36:49 UTC) çekildi. Kredi bilgileri: NASA/JPL-Caltech
Görev Planının Uyarlanması
Sonuç olarak, bugün, ikinci soldaki yola çıkmadan önce uzun bir aktivite listesi için ilk soldaki kolu açtığımız bir “temas bilimi” planından, çoğunlukla odaklandığımız bir “dokun ve git” planına dönüşmeye karar verildi. uzaktan algılama ve daha sınırlı bir temas bilimi faaliyetleri listesi (“dokunma”) ve ilk soldan (“git”) yola çıkın. Çevre bilimi açısından bakıldığında, bu tür büyük plan yeniden düzenlemeleri biraz stresli olabilir, çünkü bunlar genellikle önceden planlanmış faaliyetlerimizin son dakikada değişmesini gerektirir, ancak bugün geçiş çok şükür oldukça basitti.
Planı dönüştürme kararı zaten iyi bir karar oldu, çünkü sol ön tekerleğimizi küçük kaya yığınının üzerine park ettik (aşağıdaki resme bakın), bu da nasıl olursa olsun güvenli bir şekilde gerçekleştirebileceğimiz kol aktivitelerini sınırladı. çalışma alanı ilginçti. Sürücüyü ikinci soldan birinci sol’a taşımak aynı zamanda Cuma günü başlayacak uzun hafta sonu için planlama yapmadan önce Dünya’ya daha yararlı veriler alabileceğimiz anlamına da geliyor.

Bu görüntü, NASA’nın Mars gezgini Curiosity’deki Ön Tehlikeden Kaçınma Kamerası (Front Hazcam) tarafından Sol 4191’de (2024-05-21 10:44:55 UTC) çekildi. Kredi bilgileri: NASA/JPL-Caltech
Bilimsel Etkinlikler ve Gelecek Planlama
Daha az ilgi çekici çalışma alanına rağmen (ve başka bir gezegenin yüzeyinin herhangi bir bölümünü “daha az ilginç” olarak adlandırmanın biraz çılgınca olduğu gerçeğini bir kenara bırakırsak), bu planın içine hala yeterli miktarda bilim sığdırıyoruz. İlk sol, “Catherine Gölü”ndeki ChemCam LIBS ve biri aylardır doğu manzaramızı dolduran Kukenán tepesinde ve diğeri “Echo Ridge”de yer alan iki ChemCam RMI mozaiğiyle başlayan uzaktan algılamamızla başlıyor. Şu anda kökenini anlama umuduyla yaklaştığımız gezicinin yakınında. Mastcam daha sonra LIBS hedefini belgeliyor ve mevcut çalışma alanının hemen dışında yer alan biraz daha büyük kayalardan ikisi olan “Evelyn Gölü” ve “Emerson Gölü”nün birkaç görüntüsünü çekiyor.
Bu uzaktan algılama oturumunu, atmosferdeki toz miktarını izlemek için Mastcam tau, toz şeytanı filmi ve gezici güvertesindeki toz ve kumun izlenmesi için Navcam dahil olmak üzere bazı çevre bilimleriyle tamamlıyoruz. Arabayı sürmeden önce, Catherine Gölü’ne ilişkin bazı MAHLI gözlemlerini almak için kolu kısaca açıyoruz. Curiosity bu plandaki ilk solunu arabayla uzaklaşarak tamamlıyor, ardından Cuma günü planlamamıza yardımcı olacak standart sürüş sonrası görüntü paketimiz geliyor; buna sürücünün kum ve toz etrafında hareket edip etmediğini görmek için başka bir Navcam güverte izleme mozaiği de dahil.
Yeni bir yerde olacağımız için bu planın ikinci ayağı tamamen hedefsiz uzaktan algılamadır. ChemCam, yeni konumumuzdaki bir LIBS hedefini otonom olarak aramak için AEGIS’i kullanacak, ardından gezicinin etrafındaki toz şeytanlarını aramak için bir dizi kısa Navcam filmi ve hedefin konumunu belirlemek için bir Navcam 3×1 görüş hattı mozaiği çekeceğiz. Şu anda Gale’in atmosferinde bulunan toz miktarı. Öğleden kısa bir süre sonra, Curiosity buna bir gün (ya da aslında sol) diyecek ve bu planın geri kalanı için tekrar uykuya dönecek, ara sıra topladığı verilerle eve telefon ederek uyanacak. Her zaman olduğu gibi DAN, REMS ve RAD arka planda yoğun bir şekilde çalışmaya devam ediyor; RAD özellikle yüksek güneş aktivitesi bu son zamanlarda görüldü.
York Üniversitesi Yüksek Lisans Öğrencisi Conor Hayes tarafından yazılmıştır.
uzay-2